

Germany. A town with an industrial park. A medium-sized factory. Heavy rain drumming on the roof for days. Inside, a muffled patter. Markings on the floor separate traffic between pedestrian and vehicular from islands of production. A specially designated line serves for supply robots. Above, endless strip lighting. Factory illumination standard compliance. Below, perfect organization. Accord with Six Sigma (6σ), the industrial process improvement and quality control management system. Cybernetically-inspired1, Six Sigma is a model to “define, measure, analyze, improve, control.” With precursors in the 1970s Japanese shipbuilding industry, Six Sigma went pop in the USA in the 1990s. Systems science today controls not just machines, but people. The logo of Six Sigma—the number 6 and the Greek letter sigma σ—evokes the sign of a secret order. Workers are specially trained and ranked according to a hierarchy, with position names inspired by Japanese martial arts; a different belt and color assigned to each level.
The Black Belt
Accompanying a small group of production specialists and design engineers to a manual workplace, a female worker is finishing her task. The black belt, full-time production manager / improvement expert greets the woman and informs her that we will watch for a minute or two. He makes the worker visibly nervous, but she tries to continue working at normal speed and accuracy, for each mistake would immediately be recorded and registered on a large screen display on the way to the canteen. She stands on a mat as she screws electronic components into a metal casing. Her components are held in small, gray containers, mounted on a structure for holding them positioned within arms reach. Instructions are displayed on an overhead monitor and point out the leading source of mistakes according to its orders. She places the piece she’s been working on down in front of her, then wires the electronics cable by cable. The screws are added to the tip of the screwdriver by hand. Once they are screwed in, a function test. Successful, she peels an inspection sticker off from a large roll to her side and sticks it on. The finished product is then packed in a box and labeled with more prepared stickers.
The Decision
Engineering department. A windowless conference room. A design engineer connects to the projector and brings up a SAP (Systems, Applications and Products) analysis. He scrolls down a seemingly endless list, stopping at an itemized list, a breakdown of manual labor and production costs. In order to compete with the Chinese, costs have to be significantly reduced. While a few of the smaller components are still supplied by local firms, most of the parts already come from China. Workshops to shave off assembly time have already reduced the process by thirty seconds, but it’s not enough. Not for long-term price advantage in the global market.
Back to the Drawing Board
The next one needs to be designed in such a way that a robot can do all the work. Robots are not particularly dexterous when it comes to wiring complex components, which means threading is out of the question. Another assembly technique, like stacking, must be found. The human hand serves as a test, an experimental simulation for the robotic hand. Component prototypes are 3D printed and assembled by hand to test the robotic compatibility of the new production method. The new components result in a sensational assembly time—even by human hand—but it is too late to save the labor of human work: the robot has already been ordered. A machine-hour costs more than a human-hour, but the robot is faster and more precise. Instead of two hands, this robot uses one hand—the second is replaced by a simple holding device. The robot does not take sick leave or ask for overtime; no lunch break or beer drinking with the union representative. The company doesn’t have to pay any social contributions or give it benefits. Why should they?
-of-a-robot-worker-1WEB.jpg,1600)
-of-a-robot-worker-1WEB.jpg,1200)
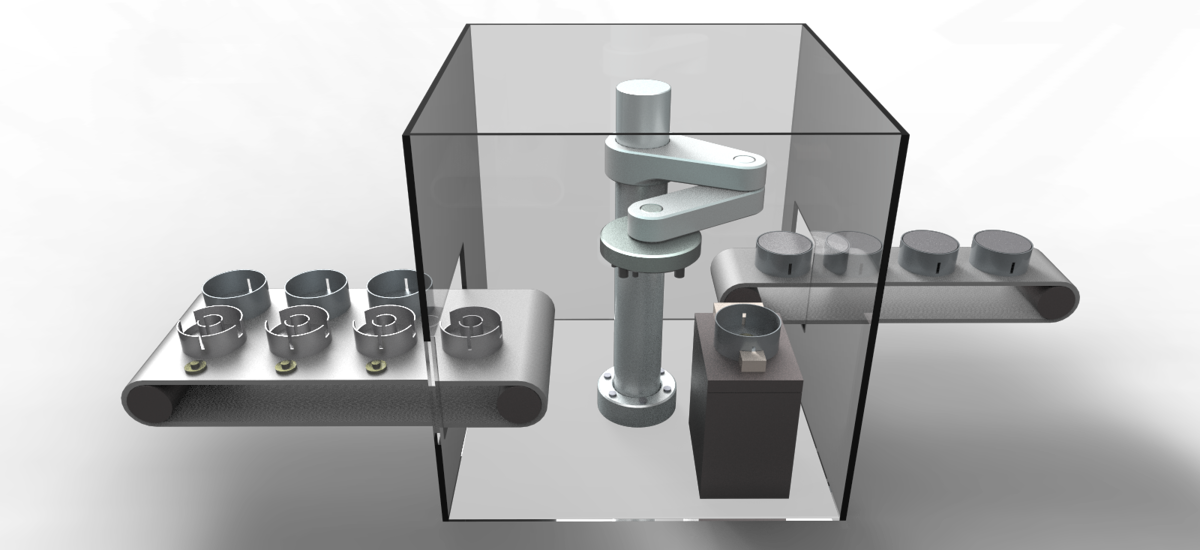
A drawing from memory of the Robot Assembly Station (2017) by the author.
Back at the Factory
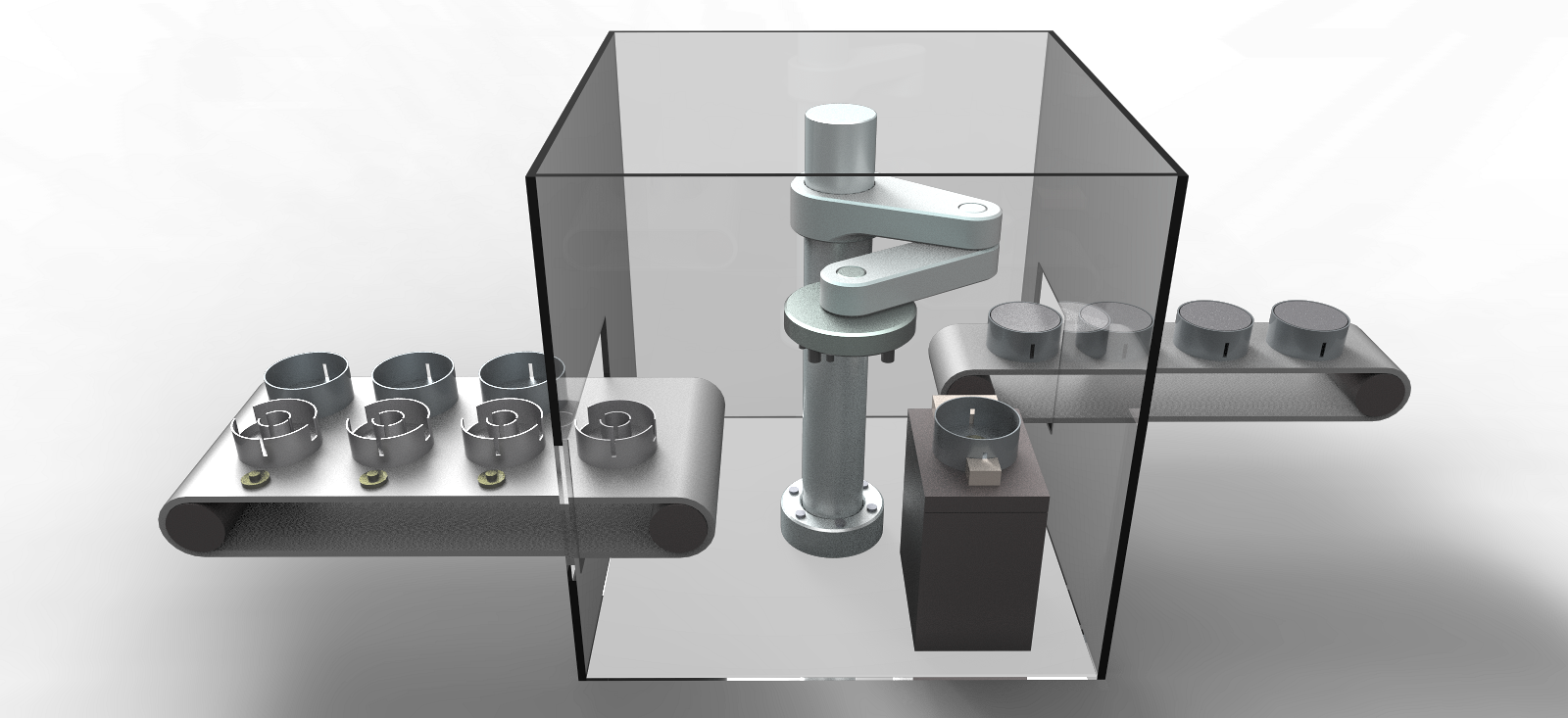
A production cell. A robotic arm stands, moving at staggering speed. Sitting within a transparent plastic structure, a wide conveyor belt transports individual components through a narrow opening inside. After a sensor measures position, the arm picks them up with the appropriate grip and assembles the product piece by piece. Once completed, a second conveyor belt transports it out of the glass cell. A female worker takes the finished product from the belt and packs it for shipping. The high-profile job went to the machine.
The Monolith
Supply robots move slowly along specially marked lines. Three onboard visual sensors at right angles control movement: the middle sensor tracks the line itself and the two outer ones correct deviations in the vehicle’s course. The small porters end at an arrival in the factory’s high bay warehouse to join a queue in front of the picking station. The warehouse—a corrugated iron monolith housing the most advanced robots in the factory—looms over the industrial zone like a cathedral. Upon arrival, products and components alike are sorted into high racks by an ultra-fast positioning unit and managed with an inventory algorithm. Components are brought forth as needed from the pitch-black recess racks to the sound of howling step motors. The organization of boxes and pallets is incomprehensible to the human mind; its legibility irrelevant to the machines’ higher intelligence. A machine might carry a one box to a remote corner of the warehouse and place the next right by the picking station. Its intelligence is linked to production. It knows all orders and contracts, how much of what the supply robots can carry, how long they take to travel from warehouse to production station, and when the supply chain will deliver the next component batch; all of which is combined, cross-referenced, and analyzed, to calculate the most efficient sorting behavior. With each order, a matrix made up of millions of components, controlled by real data and calculated probabilities, reorganizes itself anew—renders itself ever-more efficient.


Fan-out
A robot’s degree of autonomy depends on its ability to adapt to unpredictable events. Sensors and cameras are implemented and designed throughout the process to check, control, and adjust the prescribed function sequence to unexpected situations. If, for instance, defective threading of a hole is detected, the process will be automatically stopped before the screw is screwed in improperly. In such case, a red light might flash and a human operator be called upon to rectify the situation manually. While robots are very good at flawlessly executing precise processes, they are highly sensitive to any glitches in the workflow. It takes human intelligence know how to unscrew an improperly or incompletely screwed-in screw. At some point—one that can always, by definition of technological automation, happen—the robot’s autonomy will end.2 Robots must be designed to enter into interaction with human, operations personnel.
Workers who work with robots today tend to deal with the manual supply of production material and remedying malfunction. In digital electronics, the term “fan-out” describes how many inputs a certain control mechanism can manage.3 This factor is also used to define how many robots a person can simultaneously control. If one person controls one machine, the fan-out factor is 1. If it takes five soldiers to guide a killer drone to its target, the factor is 0.2. If one worker can oversee the supply and errors of ten robots, the factor is 10. What businesses want is the highest possible ratio combined with the lowest possible error rate: this is the mission of Six Sigma; what has become the operating system of production management. With robots, cybernetic management will be even more efficient than control by human work with machine logic.
With the development and incorporation of remote control mechanisms like virtual reality, it would not be hard to imagine in the near future control centers located in the middle of nowhere connected through the backdoors of robots and their operating systems around the world. Operators stationed thousands of miles away from the robots they are responsible for, yet no matter: wherever in the world a screw is loose, they will be there to remedy the situation. In case of malfunction, the human takes the machine over. For this, systems of situational awareness for the human operator are needed. The operator needs to be able to see through the eyes of the machine and use its hand if it was their own to manage production problems. When all robots are connected, they will all instantly learn, all around the world, how to manage any future occurrence of the specific situation addressed and remedied by the task operator in control. In some time, the fan-out rate will increase, dramatically.4 We should expect to be seeing less and less of humans needed to help robots out of awful situations in the future.
-of-a-robot-worker-2WEB.jpg,1600)
-of-a-robot-worker-2WEB.jpg,1200)
A drawing from memory of the Robot Assembly Station (2017) by the author.
The Robotic Arm
The decision to buy a robot is simple. It must pay for itself within a pre-determined time by substantially reducing unit production costs. While these machines used to only be deployed for big companies with extremely large batch sizes, a sharp fall in acquisition costs has turned the purchase to become increasingly common by medium-sized businesses with smaller production quotas. Screwing, welding, coating, assembling: all of these activities require a degree of skill, but all can also be automated. The only prerequisite is a robot-compatible process design.
Whereas in the past operational automation required a separate device specifically designed for each individual step in the process, robots today can execute a wide variety of steps in the production process. Depending on the job they can be bigger or smaller, can handle more or less weight, and be equipped with different tools. But in the end, they all formally, morphologically derive from a universal type: the arm. These arms represent a new species of worker. The same arm positions, screws, and assembles, radically simplifying the implementation of process automation. Just as the human can be put to work in different situations, the robot arm adjusts to different conditions and operations. It thus has become the new universal worker.
The Liberation of Robots
The standardization of robot hardware and countless ready-to-use algorithmic building blocks for controlling them has reduced the capital investment needs for implementing robotics in process operations. While we could see this as a threat to the jobs of billions, we could also see this as the potential for robotic employment to move beyond the corporate logic of profit and be put to work for the benefit of the common good. New applications of robotics in the field of social design can support local communities to lead a self-determined, good life, whatever that may mean to the specific communities employing them. The question of adapting design so that it can be assembled by robots is also the question of reorganizing work so that it can become a source of pleasure and dignity.
The Liberation of Wageworkers
Together with Six Sigma Master Black Belts, we stand behind the workers and ponder how to get rid of them. Their labor has less value economically and politically than that of an industrial robot. We face a system of machine control applied to machines and human organisations at the same time to maximize profit.
Alternatives are needed, and avant-garde design is involved in many of them. Creative Commons, open software and hardware, community empowerment and co-design are just some emergent strategies to create new scenarios for a good life in the future. We can hope that the most advanced robots will not work only in the globalized system of mass production, but also in our neighborhoods. With them we might just be able to have a local, self-controlled high-tech production for the goods we need.5 The logic of the commons6 could become the new social operating system taking care of shared resources. In and with robots, society has the possibility to overcome destructive market logics that only ask what can be bought and sold. Robots working for the common good can serve as a catalyst for new, self-defined forms of meaningful work.
Stafford Beer did pioneering work in applying cybernetic principles to the management of firms. Fredmund Malik translated that principles into German management theory.
See Paul Virilio, “ The Museum of Accidents, ” trans. Chris Turner, International Journal of Baudrillard Studies 3, no. 2 (2006), ➝.
See Illah Reza Nourbakhsh, Robot Futures, (Cambridge: MIT Press, 2013), 76)
This argument is formally akin to what AI scholars refer to as a “hard takeoff” of the singularity with artificial intelligence, debate around which has recently been enflamed by the wide-scale implementation and public deployment of deep learning software.
Frithjof Bergmann has included high-tech self supply in his concept of “New Work” to overcome the current labor system.
Compare Silke Helfrich “Das »Betriebssystem« der der Commons“ in: Helfrich, Silke, Heinrich-Böll-Stiftung (eds.) “Commons. Für eine neue Politik jenseits von Markt und Staat”, 66-68.
Artificial Labor is a collaboration between e-flux Architecture and MAK Wien within the context of the VIENNA BIENNALE 2017 and its theme, “Robots. Work. Our Future.”
Category
Subject
Translated from German by John Richardson.
Artificial Labor is collaborative project between e-flux Architecture and MAK Wien within the context of the VIENNA BIENNALE 2017.